全國(guó)咨詢熱線
15725312871
濟(jì)南旭聯(lián)儀器設(shè)備有限公司
打造國(guó)內(nèi)外知名試驗(yàn)機(jī)品牌
全國(guó)咨詢熱線
15725312871

機(jī)/電瓷鋼帽拉拔力試驗(yàn)機(jī)")
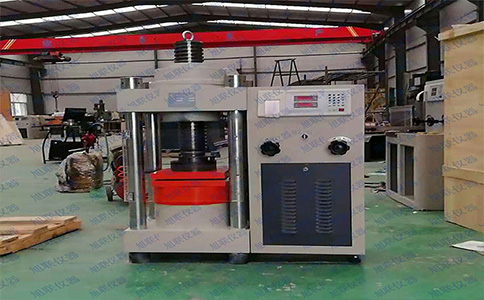
一、產(chǎn)品介紹:絕緣子鋼帽拉力試驗(yàn)機(jī)是用于測(cè)試絕緣子鋼帽抗拉伸性能的設(shè)備。它具有高精度、自動(dòng)化程度高、操作簡(jiǎn)便等特點(diǎn),廣泛應(yīng)用于各種拉力測(cè)試場(chǎng)合。該試驗(yàn)機(jī)通過電機(jī)驅(qū)動(dòng)傳動(dòng)裝置,使夾具以一定的速度對(duì)絕緣子鋼帽施加拉伸力,力值傳感器實(shí)時(shí)測(cè)量拉力的大小,并將信號(hào)傳輸給控制系統(tǒng)和顯示裝置,當(dāng)鋼帽達(dá)到屈服或斷裂...
一、產(chǎn)品介紹:
絕緣子鋼帽拉力試驗(yàn)機(jī)是用于測(cè)試絕緣子鋼帽抗拉伸性能的設(shè)備。它具有高精度、自動(dòng)化程度高、操作簡(jiǎn)便等特點(diǎn),廣泛應(yīng)用于各種拉力測(cè)試場(chǎng)合。該試驗(yàn)機(jī)通過電機(jī)驅(qū)動(dòng)傳動(dòng)裝置,使夾具以一定的速度對(duì)絕緣子鋼帽施加拉伸力,力值傳感器實(shí)時(shí)測(cè)量拉力的大小,并將信號(hào)傳輸給控制系統(tǒng)和顯示裝置,當(dāng)鋼帽達(dá)到屈服或斷裂時(shí),記錄下相應(yīng)的拉力值和位移等數(shù)據(jù),從而得到鋼帽的拉伸強(qiáng)度、屈服強(qiáng)度、伸長(zhǎng)率等力學(xué)性能指標(biāo)。
執(zhí)行標(biāo)準(zhǔn):
JB/T 8178-1999《懸式絕緣子鐵帽 技術(shù)條件》
GB/T775.3-2006《絕緣子試驗(yàn)方法 第3部分:機(jī)械試驗(yàn)方法》
二、技術(shù)參數(shù):
MAX試驗(yàn)力:300kN
試驗(yàn)力測(cè)量范圍:2% - 1**%
試驗(yàn)力測(cè)量精度:±1% FS
位移測(cè)量精度:±0.01mm
加載速度:0.01 - 500mm/min
試驗(yàn)空間:500-1000mm
夾持方式:自動(dòng)夾緊
數(shù)據(jù)采集頻率:≤10Hz,
電源要求:AC 220V,50Hz
重量:約1900kg
三、設(shè)備組成部分
1、主機(jī)部分:包括機(jī)身框架、工作臺(tái)、傳動(dòng)裝置等,為試驗(yàn)提供穩(wěn)定的支撐和動(dòng)力傳輸。機(jī)身框架通常采用高強(qiáng)度鋼材焊接而成,具有足夠的剛度和穩(wěn)定性,以承受試驗(yàn)過程中的大力值。
2、夾具系統(tǒng):根據(jù)絕緣子鋼帽的形狀和尺寸設(shè)計(jì)專門的夾具,確保在試驗(yàn)過程中鋼帽能夠被牢固地夾持,且力能夠均勻地傳遞到鋼帽上,避免出現(xiàn)局部應(yīng)力集中而導(dǎo)致試驗(yàn)結(jié)果不準(zhǔn)確。
3、測(cè)力系統(tǒng):由力值傳感器、放大器和顯示儀表等組成,力值傳感器是關(guān)鍵部件,它能夠?qū)⒆饔迷阡撁鄙系睦_地轉(zhuǎn)換為電信號(hào),經(jīng)過放大器放大后在顯示儀表上顯示出實(shí)時(shí)的拉力數(shù)值,測(cè)力精度通常較高,一般能達(dá)到 ±1% 以內(nèi)。
4、控制系統(tǒng):可實(shí)現(xiàn)對(duì)試驗(yàn)過程的自動(dòng)化控制,包括設(shè)定試驗(yàn)參數(shù)(如加載速度、試驗(yàn)終止條件等)、控制電機(jī)的運(yùn)行、數(shù)據(jù)采集和處理等功能。具備數(shù)據(jù)存儲(chǔ)、打印報(bào)表、曲線繪制等功能,方便試驗(yàn)人員對(duì)試驗(yàn)結(jié)果進(jìn)行分析和管理。
絕緣子鋼帽試樣如圖所示:

四、絕緣子鋼帽拉伸破壞性試驗(yàn)機(jī)操作:
(一)試驗(yàn)前準(zhǔn)備
試樣安裝:根據(jù)絕緣子鋼帽規(guī)格,選用適配的楔形或抱緊式夾具,將鋼帽穩(wěn)固安裝于試驗(yàn)機(jī)上下夾具之間。確保鋼帽受力軸線與試驗(yàn)機(jī)拉伸方向嚴(yán)格對(duì)齊,避免因偏心導(dǎo)致試驗(yàn)數(shù)據(jù)偏差。
參數(shù)設(shè)置:在控制系統(tǒng)中,選擇 “拉伸試驗(yàn)” 模式,設(shè)定加載速度(建議初始加載速度為 10mm/min,接近屈服階段后自動(dòng)切換至 2mm/min,確保數(shù)據(jù)采集完整),并啟用位移與力值雙重監(jiān)測(cè)保護(hù),設(shè)定位移上限與力值上限,防止設(shè)備超限運(yùn)行。
(二)試驗(yàn)過程控制
加載過程:?jiǎn)?dòng)試驗(yàn)后,電機(jī)驅(qū)動(dòng)傳動(dòng)系統(tǒng)以設(shè)定速度勻速加載,力值傳感器與位移傳感器實(shí)時(shí)采集數(shù)據(jù)并傳輸至控制系統(tǒng)。當(dāng)鋼帽出現(xiàn)屈服現(xiàn)象,力值波動(dòng)時(shí),系統(tǒng)自動(dòng)降低加載速度,精細(xì)化捕捉屈服階段力學(xué)性能變化。
斷裂監(jiān)測(cè):持續(xù)加載直至鋼帽斷裂,控制系統(tǒng)自動(dòng)記錄斷裂瞬間的最大拉力值與對(duì)應(yīng)位移數(shù)據(jù),同時(shí)保存力---位移曲線全過程數(shù)據(jù),為分析鋼帽斷裂機(jī)理提供依據(jù)。
20
2021-04
20
2021-04
20
2021-04
06
2021-05
20
2021-04
03
2018-12
06
2021-03
06
2021-03
21
2018-12
29
2018-10
濟(jì)南旭聯(lián)儀器設(shè)備有限公司 電話:0531-83628156 地址:山東省濟(jì)南市章丘區(qū)龍山工業(yè)園潘王路24199號(hào)系我們")
0531-83628156


在線咨詢:

服務(wù)時(shí)間:
24小時(shí)在線為您服務(wù)